



Within the last 12 months, a series of significant steps have been made in the world of offshore robotics; a number of legged and tracked robots made their first steps onto and around offshore facilities in Malaysia, the Netherlands, Norway and the US. For operators, it’s a big leap to have these things on facilities. For technology developers, it’s a big step towards future potential adoption offshore.
In August last year (2020), Total Netherlands claimed a first offshore autonomous mission for an ATEX robot. The Taurob vehicle was used in the condensate recovery area of the bridge-linked K5 Central Complex offshore gas production facility. Its tasks included autonomous missions and external corrosion and painting inspection, as part of evaluating use cases for these systems.
In September last year, Petronas took an ANYBotics ANYmal C quadruped robot to its Dulang B facility 200 km offshore Malaysia. Locomotion and autonomous navigation were tested, as well as general visual inspection, thermal imaging, audio recording and battery charging, over a three-floor water injection module due to the robot not being EX certified yet.
Then, in the three months October through December last year, BP trialed a Boston Dynamics Spot quadruped robot on the Mad Dog platform in the U.S. Gulf of Mexico to replicate the work personnel would do in walking the platform looking for anomalies.
The same month, a version of Spot was taken onto Aker BP’s Skarv FPSO to trial its mobility as well as communications between it, software services firm Cognite’s Cognite Data Fusion platform and Aker BP, with remote control of the robot from a home office onshore. Spot has also been trialed at Woodside’s onshore facilities.
Robots are seen to offer a number of opportunities, from reducing the exposure of personnel to harsh or dangerous environments and or reduce emissions by having lower footprint assets to being able to operate in places that might otherwise not be possible.
“Robots for us are an opportunity, a tool for a new business opportunity, for areas we might not be able to go otherwise,” says Eric Bartoli, head of remote operations and robotics – R&D, TotalEnergies. TotalEnergies has been working on robotics for some time. Its goal is to be able to support normally unattended facilities, that would be unattended for a one-year long period at a time, says Bartoli. To do that, facilities need to be more reliable, and electrification plays a big role there. But there will still be a need for some form of ‘eyes’ on site, and even intervention capability, which is where robots come in.
 Total took a Taurob Inspector on a one-week trial on a platform offshore the Netherlands. Photos from TotalEnergies.
Total took a Taurob Inspector on a one-week trial on a platform offshore the Netherlands. Photos from TotalEnergies.
TotalEnergies’ first step was the Argos (Autonomous Robots for Gas and Oil Sites) challenge from 2014-2017, developing the “first ATEX autonomous ground robot”. Since 2018, it has been part of the Offshore Ground Robotics Industrial Pilot (OGRIP), an OGTC-supported project, which has developed Taurob’s Argos-winning robot further, creating the now commercialized Taurob Inspector; a tracked vehicle able to travel around a platform to collect various data (video, infrared, sound, remote gas detection, etc.).August last year was the first time a Taurob Inspector was taken offshore, for a one-week trial on the K5 facility in Netherlands.
Taking robots to work sites offshore is a critical learning step, says Bartoli. For example, while on K5, it became obvious a robot there would need to be able to open doors to get around, due to wind shields on the facility. Being able to move on different floorings has also been a lesson – multiple, in fact. The first trials at an onshore test site with grated floors saw the vehicle’s tracks destroyed within three weeks, says Bartoli. These were improved to be able to work on the grated floors. However, new sandpaper-like anti-slip flooring installed in the test facility at Lacq has again shown higher level of wearing for tracks. Without testing, robot manufacturers don’t know about these issues that are specific to offshore oil and gas assets, says Bartoli.
It’s just as important to prove reliability, he says. Which is why, in November (2020), two Taurob Inspectors (named Charles and Edward) were handed over to TotalEnergies for a 12-month trial at Shetland Gas Plant, where only Total staff are operating them. There, they’re doing rounds autonomously in a MEG (gas dehydration) treatment unit. This is a big step, says Matthias Biegl, co-founder at Taurob.
“Using robots in an operational environment with us not being there, handing over to the operators, is a big stepping-stone and that was a milestone for us and for ground robots in oil and gas,” he says. It’s also a virtuous feedback loop says Bartoli, helping TotalEnergies to learn how to use the robot and how it will fit in operationally, as well as how to improve the robot. It also supports building acceptance of using robotics in operations; both within their peers, i.e. other operators, as well as staff on the ground, as it were.
 Two Taurob Inspectors, Charles and Eddie, are on a 12-month trial at Shetland Gas Plant in Scotland. Photos from TotalEnergies.
Two Taurob Inspectors, Charles and Eddie, are on a 12-month trial at Shetland Gas Plant in Scotland. Photos from TotalEnergies.
However, the Taurob Inspector is just the start. The next step is to introduce manipulation capability, first for simple tasks, like opening or closing valves, says Bartoli. Testing on the components for this capability has started with a first prototype expected in Q2 next year. A second track is adding more dexterity, he says, for performing simple maintenance tasks, such as changing a filter cartridge. Work on defining the specifications for this is ongoing.
For this next development, TotalEnergies is part of a joint industry project (JIP) using the OGRIP chassis to create an ATEX and IECEx certified offshore work class robot (OWCR), with partners Equinor, Total-owned battery maker SAFT and robot maker Taurob. This will include interchangeable light and heavy-duty arms, unsupervised autonomy and universal interfaces for mission-dependent attachments such as gas sensors.
And this is key. TotalEnergies doesn’t want specialised robots for specific tasks. Instead it wants to have interchangeable tooling or sensors, similar to how ROVs swap out tooling, such as the manipulator or a gas detector, with standardised interfaces so that different vendor robots and tooling can be interchanged, enabling greater uptake within the industry, says Bartoli.
Crucially, it will also involve the introduction of the first ATEX/IECEx lithium-ion battery in the energy range 500 to 1000 Wh, that are being developed by SAFT. Currently, nitrogen blankets are needed around lithium-ion batteries to make them ATEX safe, says Andy Bell, Project Manager at OGTC, a technology accelerator, or older batteries have to be used with poorer charging rates and lifecycles. The new batteries will also be able to operate harsher environmental conditions, including temperature ranging between -30°C to +60°C.
 ANYBotics’ ANYmal C legged robot took its first steps offshore on Petronas’ Dulang C platform, Malaysia. Photos from ANYBotics.
ANYBotics’ ANYmal C legged robot took its first steps offshore on Petronas’ Dulang C platform, Malaysia. Photos from ANYBotics.
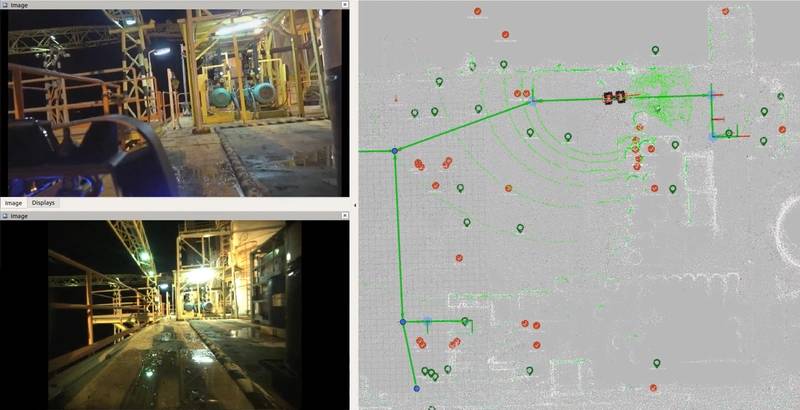 The mission user interface for ANYmal, used on the Petronas trial. Image from ANYBotics.
The mission user interface for ANYmal, used on the Petronas trial. Image from ANYBotics.
Petronas
For Iskandar Mahmood, Manager (Robotic), Petronas, “The motivation for having industrial inspection robots is to reduce HSE risk by minimizing offshore work force deployment, reduced OPEX, due to reduced offshore workforce logistics, and improved data taking and storage and automatic report generation,” he told a SPRINT Robotics seminar earlier this year.
Following onshore testing at the Institut Teknologi Petroleum Petronas (Instep)’s Upstream Downstream Training Plant in Malaysia, Petronas took its ANYmal C offshore for three weeks testing on a hydrocarbon free platform as the robot is IP67 rated (water and dust-proof), but not EX-rated. “We made use of the sensors onboard to perform a general visual inspection and read analogue and digital gauges, do thermal imaging and record audio emitting from a pump and battery recharging,” he said. The platform was also mapped over four floors, with navigation via pre-programmed way points, including traveling up 36 narrow steps with a 45-degree incline. “It was always windy, the wind speed was about 17 knots but it didn’t affect the stability of ANYmal. We went up to third floor, performed three inspection points and then came down again and we tested this a few times and it was a success.”
Walking up stairs is no mean feat. To get here, the offshore industry is leveraging decades of work, not least by the likes of Boston Dynamics, an MIT spin-out now famous for its videos of robots either falling down or, today, performing synchronized dance routines. It’s now owned by Hyundai (indicating their definite move into the commercial realm). Balance for a quadruped means having to continuously send commands maybe 400 times a second, based on an array of sensors constantly telling the software to adapt, says Maurice Fallon, Associate Professor in Engineering Science, at Oxford Robotics Institute. A lot of actions are now highly simulated before being put into action on a robot, taking into account forces that will be involved and the algorithm design. Some of the sensors robots used have also advanced, such as depth cameras. Eight years ago, robots relied on stereo cameras. Now they have 4-5 depth cameras to help them understand their environment, as well as torque-based balance algorithms and decision making – whether to step on a certain terrain or not.
Boston Dynamic’s Spot is commercially available for $75,000, and has been used for social distancing in Singapore and in the U.S. by state police, says Fallon. “A primary use case is probably in industrial inspection,” says Fallon, such as offshore, remote or nuclear facilities, that otherwise mean putting someone in harm’s way.
But there’s also still more work to do for the offshore industry, in addition to developing ATEX batteries and manipulation capabilities. For Petronas, the next steps are further pilots at a fabrication yard, a regasification terminal and CPP with ANYmal C. But from 2022, it wants to then trial ANYmal CX, which will be an ATEX certified ANYmal. This year Equinor will also take a robot offshore.
Meanwhile, following its Mad Dog trials, bp has said it plans to look more into ways robots could ‘see’ things humans can’t, using multispectral and hyperspectral imaging. “The idea is there for a robot to be able to see things a human eye can’t see, such as methane emissions,” says Adam Ballard, bp facilities technology manager.
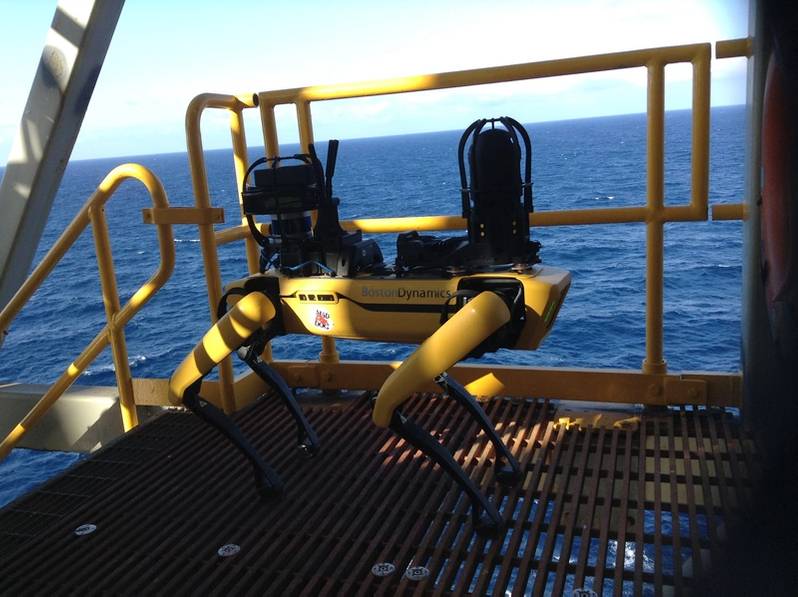 Boston Dynamic’s Spot quadruped robot posing during its trials on bp’s Mad Dog facility in the US Gulf of Mexico. Photos from BP.
Boston Dynamic’s Spot quadruped robot posing during its trials on bp’s Mad Dog facility in the US Gulf of Mexico. Photos from BP.
As well as solving the battery and manipulation challenges, there are other tasks to solve. One challenge is that existing infrastructure hasn’t been built with robots in mind. Building environments that are prepared for robots would make some of their life easier, especially for maintenance tasks.
That includes having reliable communications infrastructure, enabling connectivity with the robot and the human in the loop supervision or control that will be essentially initially. While the robots have computing on board, access to the cloud and cloud applications is an important topic, says Biegl. “If we’re operating 200 km offshore, we need low latency to make it work,” says Bell, “especially while the autonomy is being built – and it’s not quite there yet, he says.
“I think the building blocks are there,” adds Bell. “A lot of companies are out there developing solutions that need to be used in anger. But there’s no real testing center, so it’s difficult to do extensive testing to have comfort and believe the robot can do the job. The majority of developers are not from an oil and gas background, they don’t understand it and the harsh environment, so there are going to be gaps and there are some lessons learned for developers when they are on site.”
Even when high reliability is demonstrated, “To go from there to unmanned operations is another order of magnitude,” says Fallon. And then there’s also being able to show that these machines add value. “Operators need to see value in using these machines because deployment of new technologies always bear risks,” says Biegl. “Like Total and Equinor, you need to have a vision as an operator to see this as the future and dive into it and engage financially. These machines are complex and you need skin in the game. Adoption also needs education within these corporations, especially for the people who will work with these robots.”
Fact file
Taurob Inspector is now commercialized and will be manufactured to scale in France and hopefully deployed around the world with partner Dietsman. It’s a tracked vehicle with cameras, Lidar, smart algorithms to detect a valve or pump gauges to see if they’re operating in the right parameters or to do a general visual inspection of corrosion. It also has microphones so it can get a base frequency of a value and then hear if it’s operating out of that frequency. It will also have thermal imaging in it for gas releases, weeps and seeps.
ANYmal is a quadruped with an open API based on ROS industry standards to integrate robots and is able to operate for 90 minutes and recharge in 100. It has various sensors, including Lidar, a visual camera with 20X optical zoom, for images and video at 4k resolution. It has a thermal camera, ultrasonic microphone for acoustic measurements and LED spotlight. The sensor pack can be extended with up to 16kg additional payload. With its Lidar it can track structural changes in the environment. ANYmal says it can connect though Wifi, 4G LTE but doesn’t need continuous connectivity because of the sensors and intelligence onboard. In 2018, an ANYmal was taken offshore the Netherlands for a one-week trial aboard an offshore work transformer platform.
 Subscribe
Subscribe










