|
| Simulated 3D laser image of a subsea tree |
Lockheed Martin's John Jacobson and Dan McLeod explain the comapny's latest tool for subsea integrity management.
Recent advances in underwater 3D laser imaging and autonomous underwater vehicle (AUV) technologies hold the potential to deliver revolutionary capabilities for subsea structural integrity management. Underwater 3D laser sensors now offer the angular resolution, range, and scan rate to deliver dense, 3D-point cloud images of subsea structures with millimeter resolution at tens of meters of standoff distance, while also opening the door for the application of a wide range of software tools from the terrestrial survey industry.
At the same time, state-of-the-art AUVs now include real-time 3D modeling and change detection using high-resolution 3D sonar. Lockheed Martin, supported by funding from Research Partnership to Secure Energy for America (RPSEA), is merging these technologies through a two-year, four-phase project, now in its final stage.
Using an underwater 3D laser developed at Depth LLC, this new project will enable autonomous, real-time, millimeter-resolution 3D modeling, change detection, and structural integrity assessment. Results will be delivered while offering improved safety, higher-operating efficiencies, and reduced costs to the field operator.
Project objectives include demonstration of 3D mapping and change detection using an AUV-based 3D laser. This will include high-resolution imaging of underwater structures from a moving AUV, generation of high-resolution, georegistered 3D models of subsea structures, and detection of changes against a priori structural models.
Progress to date has included development of performance requirements and interface specifications between Lockheed Martin’s Marlin AUV and the 3D laser; the design, build, and test of the 3D laser; and integration of the laser into the Marlin. A critical aspect of this development is the real-time fusion of the 3D laser and sonar data with the vehicle’s navigation and control systems to produce high quality, motion-compensated 3D models.
In order to verify proper performance prior to offshore testing, extensive highfidelity simulation of 3D laser imaging from a moving Marlin AUV platform was conducted in Lockheed Martin’s simulation laboratory located in the company’s West Palm Beach, Florida, facility. Simulation was conducted against a range of operational scenarios developed in conjunction with a project working group team consisting of members from six major deepwater operators. Simulation testing included the following scenarios which were deemed to be of high interest by the Working Group:
 |
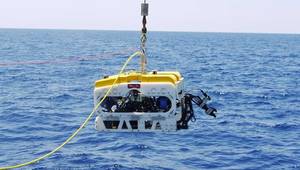
| Lockheed Martin's Marlin AUV will be outfitted with a 3D laser for offshore trials 1Q 2014. |
Simulation testing uncovered several interesting findings. As an example, assume an AUV was swimming at 2 knots at approximately a 5m-standoff from the target. After insertion of simulated noise for timing, sensor calibration, sensor errors, and representative navigation errors, the results of simulated measurement of wellhead verticality were less than 0.08° from ground truth.
Excellent results were also obtained for measurement of dimensions and/or volume for jumper metrology (<0.5% error), anode depletion (2-4% error), and spoils volume (<2% error), which all fall well within the desired operational accuracies for such inspections.
Simulation test cases involving detection and measurement of dents, pits, and cracks generated errors ranging from 2% to 40%, driven by laser sensor characteristics and depending on the geometries used for measurement. Further work is required to understand these errors and assess the AUV and sensor operational parameters that optimize these results, but given the range of size of flaws being measured (1-3cm depth, 1-7cm width) these results may be acceptable in many structural integrity management applications.
During this final phase of testing, offshore testing of the prototype 3D laser imaging hardware and software are being conducted in local offshore waters adjacent to Lockheed Martin’s Palm Beach facility. The objectives are to demonstrate 3D laser images from a mobile AUV with accuracies at the sub-centimeter scale, and to prove that AUV-based 3D laser imaging is a viable alternative for inspection of subsea structures such as trees, jumpers, pipeline end terminations, manifolds, pipelines, flowlines, risers, and mooring lines. Tests include AUV-based laser imaging of mock-up test fixtures and/or local wreck sites using the Marlin AUV that represents the same operational test cases as those evaluated in Lockheed’s simulation laboratory. AUV-based 3D laser imaging can perform a wide range of inspection tasks, including generation of geo-registered “as-built” models of structures on the seabed or in the water column, periodic survey of subsea infrastructure and comparison against a baseline model, and autonomous detection of structural defects or other out-of-spec conditions that exceed threshold values.
Once an out-of-spec condition is detected by the AUV’s onboard perception autonomy software, a preprogrammed “revisit” maneuver can be invoked to reposition the AUV and obtain more video, sonar, and/or laser data. Additionally, such conditions can be automatically flagged to the operator upon completion of the inspection mission. This provides the dual benefit of (1) more rapid and accurate identification and review of critical conditions by integrity management engineers and (2) reduction in operator fatigue and subsequent operator errors caused by long hours of monotonous review of inspection data.
The future implications of this technology for structural integrity management are wide-ranging, with numerous potential applications in deepwater fields. An example of a potential application would be an AUV pipeline inspection conducted with 3D laser imaging, feature-based navigation, and real-time 3D modeling and change detection. As another example, a new survey would be able to autonomously detect and measure movement of the pipeline, changes in pipeline contour (potential buckling or over-bending), changes in scour, berm and free span conditions, anode depletion since the last survey, changes to pipeline surface conditions (pits, cracks, dents), and new anomalies or debris that may impact pipeline safety using a reference model of the pipeline and seabed obtained from a previous baseline survey.
Similar scenarios could be expected for AUV-based laser inspection of risers, mooring lines, and other subsea infrastructure. In addition, the ability to conduct subsea installation and construction tasks such as high-accuracy seabed bathymetry, jumper metrology, and wellhead verticality measurements from a moving AUV could offer significant advantages.
Building on the success of its 300m rated Marlin AUV, Lockheed Martin is currently developing a new Marlin variant, the Mk3, which will be capable of operations in water depths up to 4000m. In addition to carrying a full suite of conventional survey and inspection sensors such as multi-beam sonar, side scan sonar, and HD video, the Marlin Mk3 will employ high-resolution 3D sonar and 3D laser sensors to perform autonomous pipeline inspection and deepwater facility inspection.
 When completed, the Marlin Mk3 is expected to provide deepwater operators with 3D laser imaging capability that will provide a next generation tool for structural integrity management.
When completed, the Marlin Mk3 is expected to provide deepwater operators with 3D laser imaging capability that will provide a next generation tool for structural integrity management.
The long-term benefits of AUV-based laser imaging for structural integrity management could be significant. First, the field operator reaps the benefits that AUV inspections can offer over current ROV inspection methods for deepwater fields, including smaller vessels, smaller crew, and elimination of the ROV umbilical. These benefits translate to lower overall life-of-field cost for structural integrity management, and will enable more frequent inspections at an affordable cost. Autonomous 3D modeling and change detection can also positively affect accuracy and operational efficiency. Not only do inspections become more efficient, but also, factors such as human fatigue and inspection data overload are eliminated from the equation.
The availability of detailed 3D models from prior surveys can benefit structural analysis and defect evaluation, and the application of third-party software tools from other industries, such as terrestrial survey, will also enable increased operational efficiency.
AUV-based 3D laser imaging has the potential to become a transformational tool for structural integrity management, enabling autonomous, real-time high resolution 3D modeling, change detection, and structural integrity assessment while offering significantly improved safety, higher operating efficiencies, and reduced costs to deepwater field operators.
John Jacobson is a senior program manager for Lockheed Martin’s Offshore Systems and Sensors program and is based in Houston, Texas. He holds a Bachelor of Science degree in Physics and a Master of Science degree in Computer Engineering from the University of Southern California.
Dan McLeod is the deputy director of Offshore Systems & Sensors at the Lockheed Martin, Riviera Beach, Florida. Mission Systems & Training Business. He holds a Bachelor of Science degree in Ocean Engineering from Florida Atlantic University.
 Subscribe
Subscribe